Got to fly (quadcopter) this weekend. Also got to fly (airplane) this weekend to New Braunfels, which took me directly over the field I fly my quadcopter in.
Speaking of my quadcopter, I’m starting to work on a new vision landing system. So far I just have test imagery of a pad:

Clearly a downward facing camera. The picture below will back me up on this:

But then where did this picture come from?

Note the (illegible) datestamp in the corner, which came from that webcam.
I feel like a downward facing camera wouldn’t have a picture of the sky. I always thought it was just a figure of speech to have eyes on the back of your head - apparently this webcam literally does.
Anyway, the plan is to have the Pi do image processing to detect where the copter is in relation to the pad, and then it’ll tell the Pixhawk to move to align with the pad.
Altogether the Pixhawk, Pi, GPS, 900MHz radio downlink, and webcam pull 0.8A. In case anybody’s wondering. Also, I get 190 seconds of flight time with a 3s 2200mAh. There’s relatively little literature on the web about what to expect, so that’s the number I’ll quote for people who are looking. I can get about 5m/s top speed out of it, so I can fly 950 meters on a full charge. 450 meters if I want it to come back also.
But numbers are hard to grasp, so let’s overlay it on Google Earth. The red circle is my max operational range. The yellow circle is my one-way-ticket range.
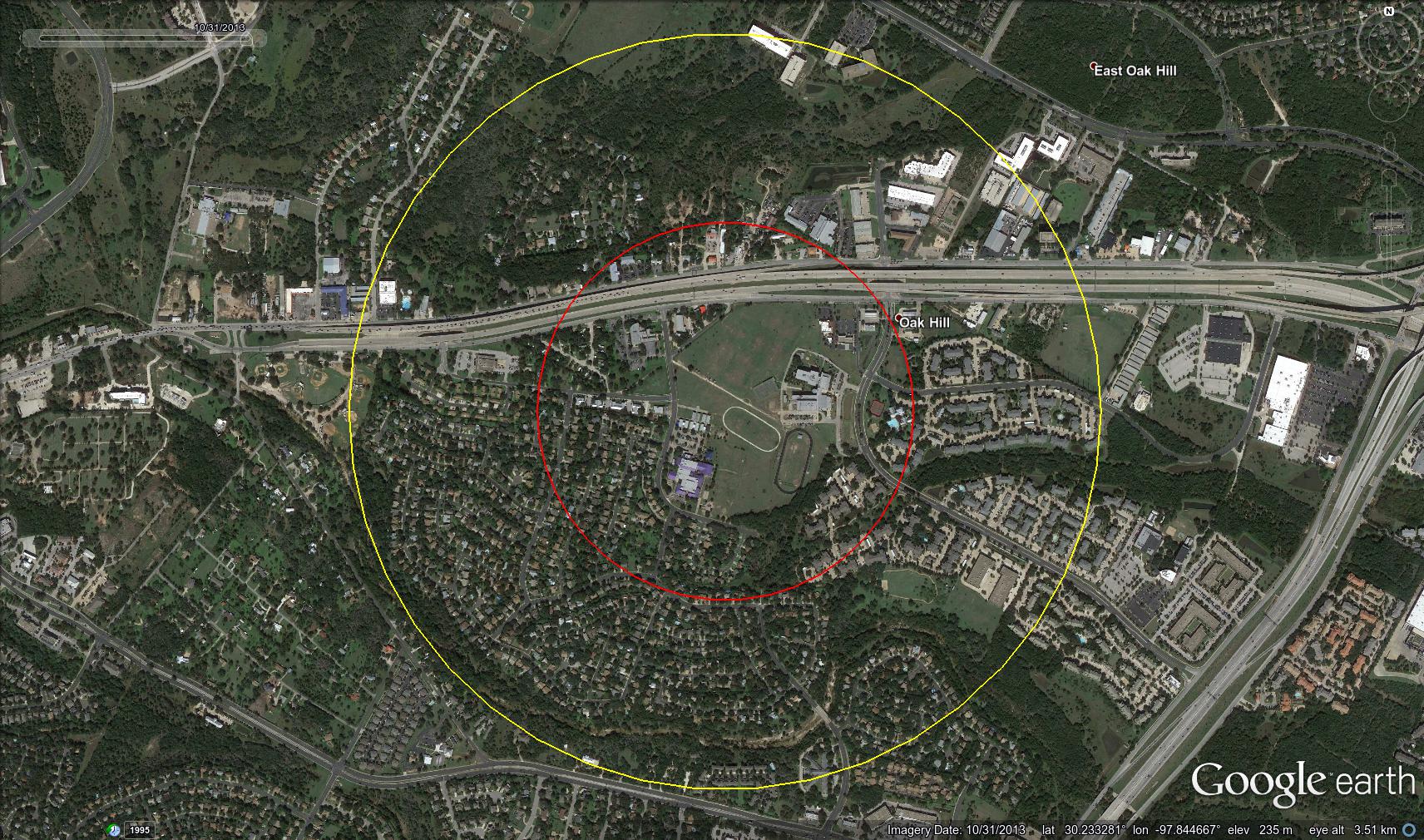
North is oriented as up. Please don’t try to stalk me using this picture. I don’t even live here. Nobody lives here. I fly in a fake neighborhood that was constructed to scare away enemy bombers.
Anyway… The neighborhood to the Southwest very nicely fits inside the one-way circle. Coincidence? Probably not. The school district that serves this fake neighborhood has all sorts of rules about busing children more than certain distances to school. (that’s a school that I fly out of in the center, by the way. Two schools sharing a campus, actually)
So, I have a webcam on a quadcopter, what should I do with it? Obviously there’s some really cool stuff I can do. Like play with poles. Or juggle. Or something with LEAP motion. Or build stuff. If you’re taking applications, Zurich, count me in!
Anyway. Right now I just have a panorama to show off:
http://pillow.rscheme.org/uav/panorama.html
I was having resonance issues with the camera, so some images have a high frequency wobble in them which is caused by the camera shaking while the webcam’s reading out scan lines. I hadn’t had this issue before Sunday so I don’t know exactly what started causing it, although the winds were a little stronger that day, 20 mph gusting to 25. Enough to make the panorama be at a visible tilt - that tilt is the quadcopter compensating for the wind.
Notice the highway with cars on it. Observe the following two images:


The second image was taken exactly 1 second after the first one. Take special note of the white car/truck thing that’s in front of the black SUV thing that’s moving left-to-right. It’s above one tree in the first image then a different tree in the second, just to the left of center (right where the off ramp is).
According to Google Earth, the distance between the quadcopter and the highway is 277 meters as the crow flies, plus the 100 meters off the ground that I operate my copter at, and the highway goes away from the copter at about 10 degrees. My measurements indicate that the horizontal field of view of my webcam is 49 degrees.
According to GIMP, the truck moved from pixel 270 to pixel 326, or 56 pixels. I accounted for the motion of the UAV manually, but ideally that’d be automated.
The images above are 640 pixels wide, so 56 pixels is 8.75% of the field of view or 4.288 degrees. Note that the copter is 294.5 meters from the section of highway in question, so 4.288 degrees translates to 22.08 meters.
However, remember that the truck is going away from the camera at a 10 degree slant. How do we account for this? We remember Trig. Specifically, the observed motion will equal the cos(angle from perpendicular) multiplied by actual motion. In numbers, 22.08 m/s = cos(10 degrees) * velocity, so velocity = 22.42 m/s or 50.15 mph. Which the speed limit on that segment of road is something like 65 mph. So Anonymous Truck Alice was going (well under) the speed limit!
That was anti-climatic. I was kind of hoping to catch a speeder.
Point is, I could have caught a speeder. If there had been a speeder.
Sometimes there are speeders.
And I will find them.