I’m going to start running out of crunch-related names. I better practice my quadcopter flying.
Here’s a telemetry graph of what happens when you lose a propeller mid-flight:
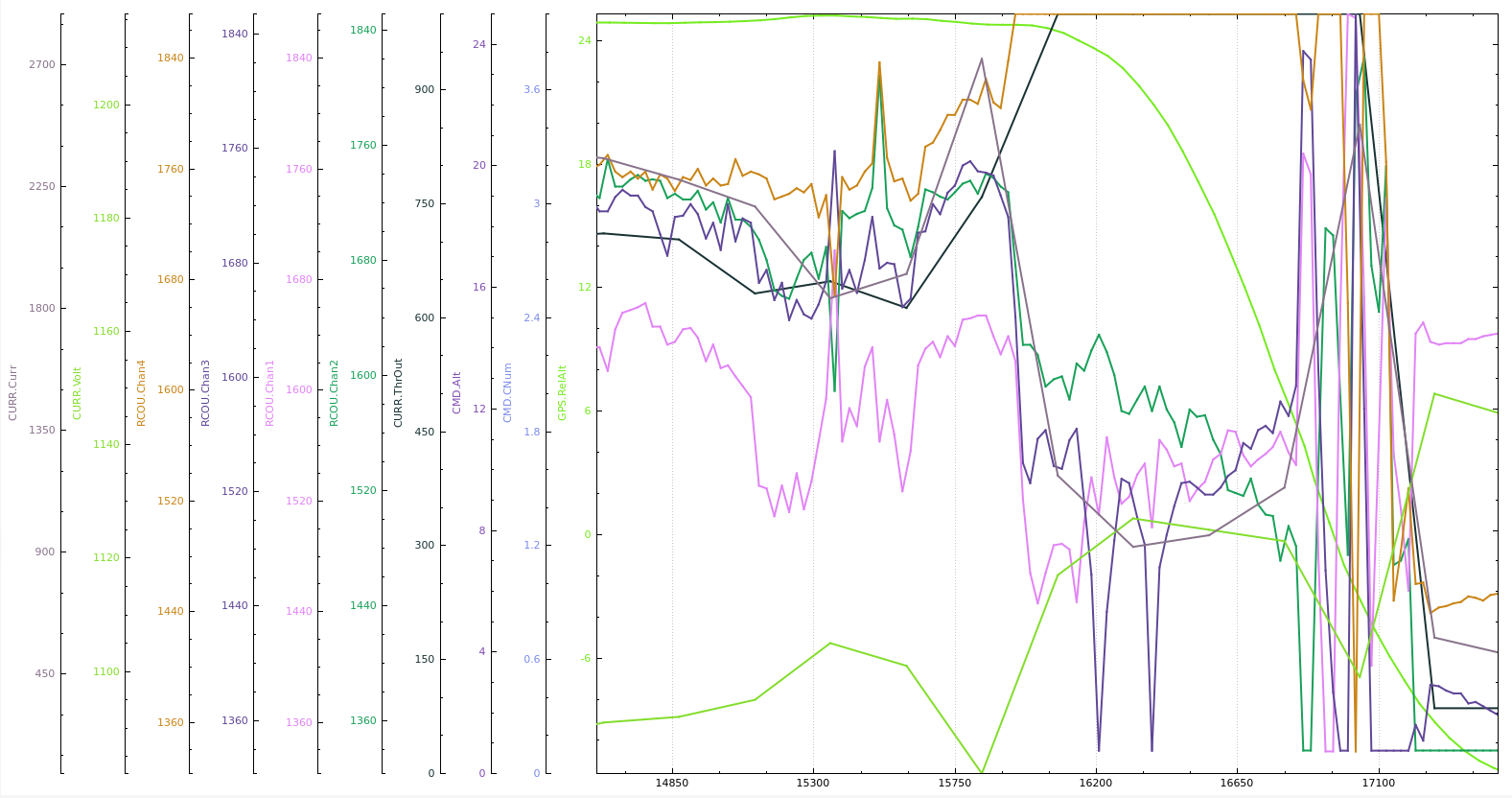
(you may have to click on it to view closer) Note the brownish line, which is the motor 4 output signal. It stays synced (roughly) with the others until 16000 on the X, at which point I lost the prop and the control system pegged the motor throttle to compensate. Then it hit the ground, bounced a couple of times, etc.
On happier news, I’ve been working with RunSFM (http://nghiaho.com/?page_id=253), which is a SFM implementation made by Nghia Ho. It’s really quite nice. Here’s a link to a pointcloud of my R/C radio:
Okay, I lied. I can’t get PotreeConverter to work, and Google doesn’t reveal any other pointcloud viewers. It’s saying something about a regex_error. This’ll take some looking into.
That came from about 40 images.
For reference, here’s my timing data with RunSFM on a 4-core 8GB machine:
42 full-res images (3888px wide): 151 minutes by the clock, 343 minutes CPU time.
40 full-res images (3888px wide): 89 minutes by the clock, 214 minutes CPU time.
So a lot of variation, depending on the nature of the images I suppose.